A Study in Fabricated Input for Rehabilitation
Master's AAU 2020
Master's AAU 2020
A novel way to rehabilitate limb control post-stroke is through a brain-computer interface (BCIs) and motor imagery. The rehabilitee can imagine a movement which is picked up by the BCI and translated into a tool guiding the user to perform the imagined movement. Due to the neuroplasticity of the brain, the rehabilitee can regain some movement, through this process.
However, people need to commit to this procedure for a long time, and there are plenty of problems that can prevent them from wanting to do this. BCIs are inaccurate and often give wrong feedback, both false negatives and false positives. Additionally, it is conventionally a boring task. Performing a monotonous task riddled with bad feedback feeds into frustration which only makes the BCI more inaccurate, until the user will go back to more conventional rehabilitation techniques.
As our master's thesis, my group and I wanted to address this frustration and develop a framework for BCI, that people would stick to.

We looked through as many BCI papers we could find to see if we could find a pattern of interaction in this modality. What we found can be seesn here. We found that often a task was preceded by a cue to start the task, and followed by feedback to stop the task. We decided to replicate this, but with signals before both prep and task.
Going through litterature on BCIs we compiled an exhaustive list of BCI interactions and their structure - we called these interaction paradigms. These showed that BCIs often have a specific time period for receiving input. To address the inaccuracy of BCIs we decided to randomly inject fabricated input into the system, giving people a 'successful' feedback if the system had not received input in this time period (both in cases of false and true negatives, as their is no way to distinguish them). For this injection not to be noticeable, we had to consider the very nature of interacting with a BCI, as there is no inherent feedback in thinking. This means, that the user will know that they tried but the system won't, making it difficult to provide fabricated input at the correct time - in past studies, they usually gave feedback at the end of the input window, regardless of type in order to avoid this potential incongruency.
This study being scientific also introduced some tensions, because every participant had to experience the exact same ratio of successes-failures for comparison. No other studies had used fabricated input with real user inputs, so we could not draw any immediate parallels to the state-of-the-art. We decided to use an urn model to create a reliable experiment.
This field in general is novel and performance-accommodation mechanisms have never been described in a coherent, encompassing way, so the study required comprehensive research, understanding and synthesising to even get started.

Over two semesters we created two solutions to perform two experiments: one to narrow down what the optimal level of injected fabricated input would be, and another to understand the broader field of fabricated feedback and compare different methods of assistance. Sadly none of the experiments utilized real, working BCIs, only approximations made with other systems just as prone to erroneous input.
We synthesised the field of performance-accommodation mechanisms and created a framework of four initial models. We acknowledge that these models are not perfect, as there are so many variables at play, and we constantly found situations where our models were too broad or too general. This was as far as we know, the first attempt by anyone to create a framework of this field, and we believe that they will help further the field in describing and refining various techniques.
1
Also sometimes called a rule change. It can occur in situations with no or sub-optimal input, and converts it into a regular success implicitly. The user would not immediately know that is was fabricated.
2
Most often used in continuous inputs such as control sticks for steering. It essentially is split ownership, where some agency is moved from the user to the system in order to rein them into the right path.
3
This can only occur when the system receives a successful input. A conventional success is turned into a boosted success, for example giving two points instead of one. This is done explicitly so the user knows that they received helped.
4
This can occur in the same situations as fabricated input, but is different in the sense that it is explicit. It changes the feedback to a conventional failure input into a neutral state where nothing was gaines and nothing was lost by the user.
Our studies showed that fabricated input increases perceived control and lowers frustration most effectively when injecting feedback in 30% of failed attempts, but that it is highly dependent on context. For example, when the users are aware of it happening, the effect dissappears and another mechanism (such as assisted success, where a succesful input gets a boost) would be more effective. Many more studies in this field would be beneficial, as our experiments were not representative of the real-world context: did the software make a difference on the results, did the input modalities or the participants?
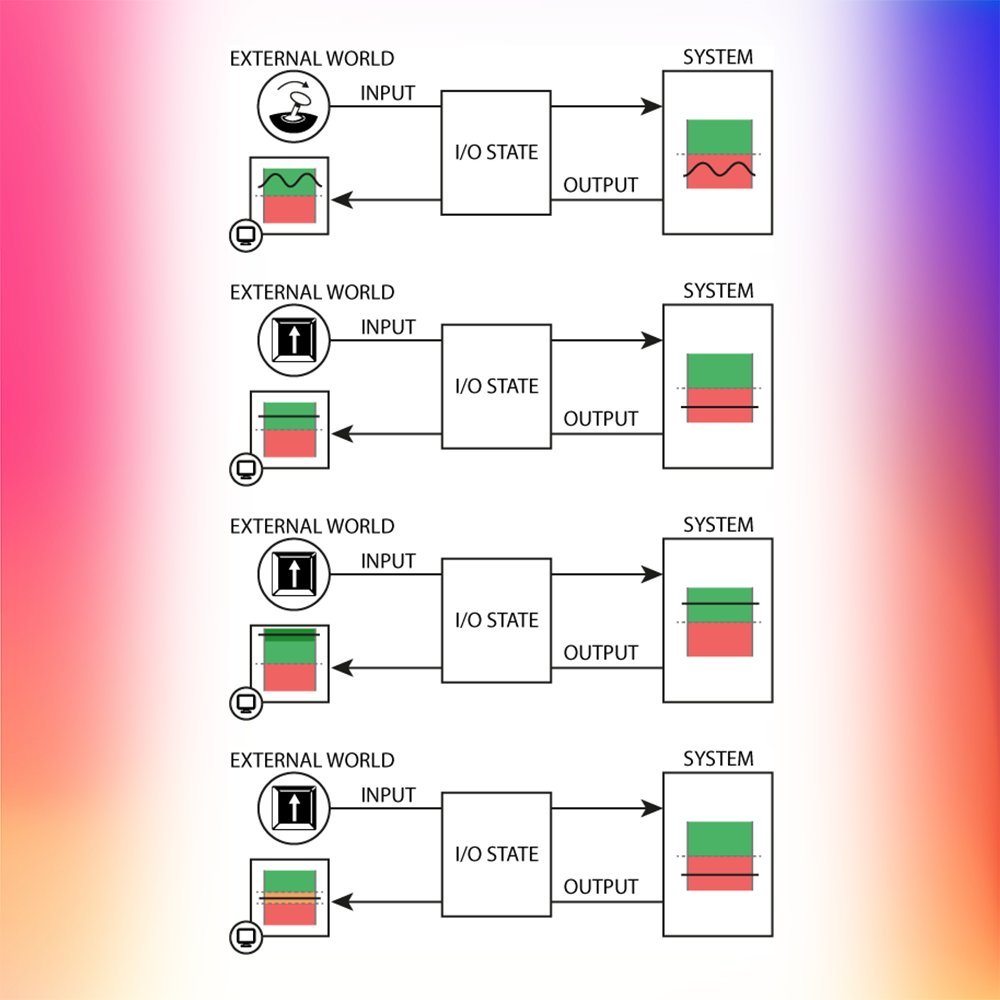
The four models that create the framework established in this study. (1) Shared control, (2) fabricated input, (3) assisted success, and (4) assisted failure.